

RRT
The Rapidly Exploring Random Tree (RRT) algorithm is very useful for Path/Motion Planning in robotic systems. This algorithm is a fast probabilistic method of searching a configuration space, and works for both holonomic and non-holonomic systems.
This project is a python program that builds a RRT with or without constraints, and displays the tree/path generation in real time.
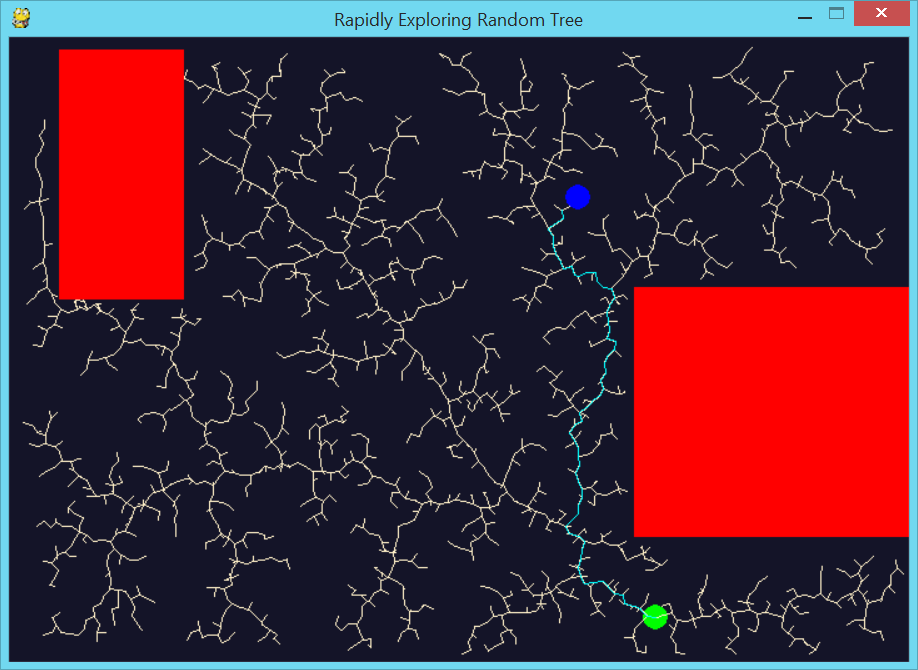 Here is an example of the program's output
Here is an example of the program's output
